Compact-Logic stellt verschiedene Funktionsbausteine für Stepper-Antriebe bereit.
Je nach Aufgabe – einfache Bewegung, Positionierung oder koordinierte Bahnbewegung – steht ein spezialisierter Funktionsbaustein zur Verfügung. Die folgende Übersicht hilft bei der Auswahl des passenden Bausteins.
Stepper Move (Relativ / Drive)
bewegt
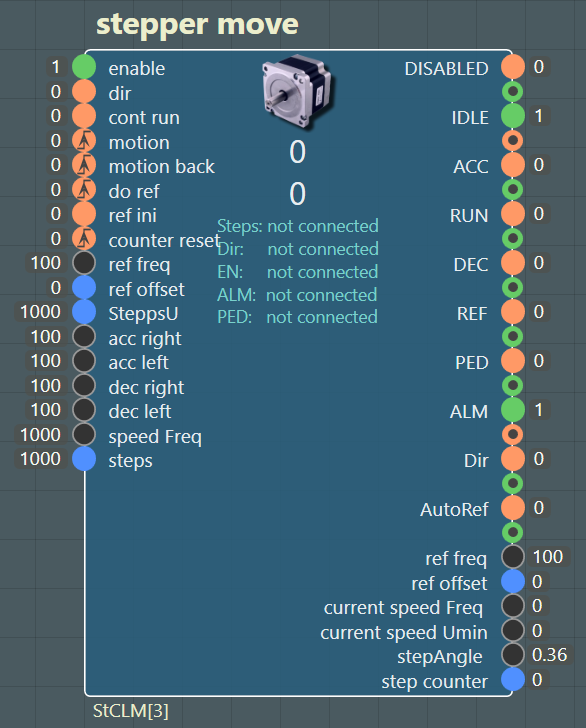
- Bewegt einen Stepper um eine definierte Strecke in einer vorgegebenen Richtung
- Geschwindigkeit und Beschleunigung werden vorgegeben
- Keine absolute Zielposition notwendig
- Optional mit autom. Referenzierung
- Schieber vor/zurück
- Förderband takten
- Indexieren von Werkstücken
- Einfaches Joggen
Einfache, robuste Bewegungen, bei denen der Weg wichtig ist, nicht die absolute Position im Raum.
Stepper Position (Absolut)
positioniert
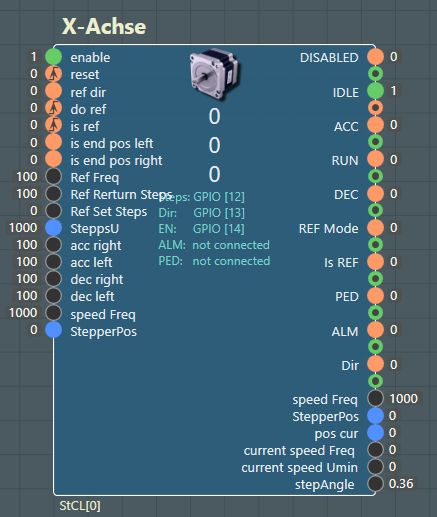
- Fährt eine Achse auf eine absolute Zielposition
- Arbeitet auf Basis eines Referenzpunkts (Homing)
- Hält oder überwacht die Position nach Erreichen
- Optional mit Endschalterüberwachung
- Positionieren von Anschlägen
- Einfache Automaten (XY-Raster)
- Öffnen von Toren oder Klappen (z. B. 30 %)
- Bohren auf definierte Tiefen
- Verstellen von Werkzeugen oder Sensoren
Positionsaufgaben, bei denen eine reproduzierbare Zielposition im Vordergrund steht.
Stepper Path / XYZ (G-Code)
fährt Bahnen
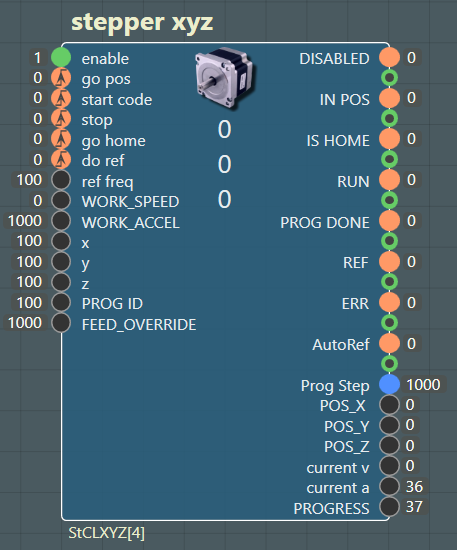
- Steuert mehrere Achsen synchron
- Der Verfahrweg ist geometrisch definiert
- Unterstützt G-Code (z. B. G0/G1)
- Eignet sich für bahngebundene Bewegungen
- Plotter- oder Fräsbewegungen
- Koordinierte Positionierung mehrerer Achsen
- Bewegungen mit konstantem Vorschub entlang einer Linie
Koordinaten- und Bahnbewegungen, bei denen der Weg entscheidend ist, nicht nur Start und Ziel.
Hinweis zur Maschinensicherheit
Die Ansteuerung von Motoren kann – abhängig von Mechanik und Anwendung – zu bewegten Teilen und damit zu sicherheitsrelevanten Gefährdungen führen. Compact Logic ist eine Steuerungs- und Logikumgebung und keine sicherheitszertifizierte Steuerung. Funktionen der Maschinensicherheit, wie z. B. Not-Halt oder sichere Abschaltung, sind nicht Bestandteil der Software. Erforderliche Schutzmaßnahmen müssen separat und unabhängig von der Steuerungslogik umgesetzt werden, z. B. durch:
- einen elektrischen Not-Halt, der die Versorgungsspannung der Antriebe abschaltet
- mechanische oder elektrische Eingriffsschutze
- Einhausungen oder Abdeckungen bewegter Teile
Die klare Trennung von Steuerungslogik und Sicherheitsfunktionen entspricht dem etablierten Vorgehen in professionellen Maschinen- und Automatisierungssystemen.
Stepper Move- und Position-Mode – gemeinsame Grundlagen
Die Funktionsbausteine Stepper Move und Stepper Position verfolgen unterschiedliche Zielsetzungen, basieren jedoch auf denselben grundlegenden Bewegungs- und Antriebsmodellen. Beide Bausteine nutzen identische Mechanismen zur Erzeugung der Schrittimpulse, zur Rampenberechnung sowie zur Zustands- und Fehlerverwaltung. Der Funktionsbaustein Stepper Path (G-Code) wird aufgrund seiner abweichenden Arbeitsweise auf einer separaten Seite beschrieben.
Gemeinsame Eigenschaften
Beide Funktionsbausteine:
- erzeugen Schrittimpulse mit Beschleunigungs- und Bremsrampen
- nutzen identische Mechanismen zur Richtungs- und Geschwindigkeitssteuerung
- stellen umfangreiche Zustands- und Diagnoseinformationen bereit
Die Ausgangswerte können für:
- Visualisierung (HMI)
- Fehlersuche
- Systemverständnis
- sowie zur Weiterverarbeitung in der Anwenderlogik
verwendet werden.
Gemeinsame Eingangsparameter
Die folgenden Parameter sind bei Stepper Move und Stepper Position identisch aufgebaut:
- Schritte pro Umdrehung
Anzahl der Schritte für eine vollständige Motorumdrehung (inkl. Microstepping) - Beschleunigungs- und Bremswerte, Getrennte Parametrierung für:
- Beschleunigen / Bremsen
- Bewegung nach rechts / nach links
- Zielgeschwindigkeit
Schrittfrequenz der Konstantfahrt nach Abschluss der Beschleunigungsrampe
Diese Parameter definieren das dynamische Verhalten des Antriebs
und wirken unabhängig von der jeweiligen Funktionsweise des Bausteins.
Stepper Move (Relativ / Drive)
Standard-Mode
(Einzelbewegung / Hin- und Rückbewegung)
- Ein Impuls am Eingang Motion bewegt den Motor
- mit Beschleunigungs- und Bremsrampe
- um die vorgegebene Anzahl an Steps
- Ein Impuls am Eingang Motion Back
- bewegt den Motor um die gleiche Strecke
- und anschließend wieder zurück
- Wird das Signal DoRef gesetzt,
- dreht der Motor mit der Referenzfrequenz
- in die vorgegebene Richtung
- bis der Eingang RefIni (z. B. Initiator) aktiv wird
Typische Anwendungen
- Schieberbewegungen
- Indexierbewegungen
- einfache Referenzfahrten
AutoRef-Mode
(Bewegung mit automatischer Referenzierung)
- Entspricht dem Standard-Mode
- Zusätzlich wird nach jeder Move-Back-Bewegung
- automatisch eine Referenzfahrt ausgeführt
Automatische Referenzierung
- Nach Abschluss der Rückbewegung:
- fährt der Motor selbstständig zurück
- bis das Signal RefIni erkannt wird
Typische Anwendungen
- Positionieraufgaben mit regelmäßigem Nachreferenzieren
- Anwendungen mit erhöhten Genauigkeitsanforderungen
- Mechaniken mit möglichem Schlupf oder Spiel
Motion-Mode
(Kontinuierlicher Motorbetrieb)
- Der Baustein arbeitet als reiner Antrieb
- Das Signal ContRun startet eine kontinuierliche Bewegung
- mit Rampe
- in vorgegebener Richtung
- mit definierter Frequenz
Eigenschaften
- Keine feste Schrittanzahl
- Bewegung läuft, solange ContRun aktiv ist
- Ideal für Dauerbetrieb
Typische Anwendungen
- Förderbänder
- Bandanlagen
- kontinuierliche Materialzufuhr
Stepper Position (Absolut)
Beispiel 1: Einfache Positionierachse
Eine einzelne Achse soll reproduzierbar auf verschiedene Positionen fahren.
Aufbau
- NEMA-17 Steppermotor
- DRV8825 Steppertreiber
- FB2 steuert die Achse im Positionsmodus
Funktion
- Vorgabe einer absoluten Zielposition
- Unterschiedliche Geschwindigkeiten und Beschleunigungen möglich
- Der Baustein fährt die Achse kontrolliert auf die Sollposition
Typische Anwendungen
- Anschläge
- Verstelleinheiten
- einfache Linearbewegungen
Beispiel 2: Manuelle Positionierung mit Drehgeber
- FB2 steuert die Positionierachse
- Rotary Encoder zur manuellen Vorgabe der Sollposition
- Skalierte Geschwindigkeiten (Fein / Grob)
- LED-Statusbalken zur Positionsanzeige
Funktion (entsprechend dem gezeigten Programm)
- Der Drehgeber erzeugt Positionsänderungen
- Je nach gewählter Skalierung (x1 / x10 / x100)
- wird die Sollposition fein oder grob verändert
- FB2 fährt die Achse auf die jeweils neue Sollposition
- Die aktuelle Position wird kontinuierlich:
- am FB-Ausgang ausgegeben
- auf einem LED-Statusbalken visualisiert
Typische Anwendungen
- Positionieren von Sensoren oder Werkzeugen
- Handverstellung von Achsen
- Einrichten / Justieren von Maschinen
Einfache 2D-Positionierung mit zwei Achsen
Zwei Achsen bilden einen 2D-Arbeitsbereich.
Positionen werden manuell angefahren oder aus einer Koordinatenliste abgearbeitet.
- Positionen können manuell durch direkte Vorgabe der Sollwerte für X und Y angefahren werden oder automatisch aus einer X/Y-Koordinatenliste.
- Jede Achse fährt dabei unabhängig auf ihre Zielposition; die aktuellen Positionen stehen jederzeit zur Verfügung.
- Im automatischen Betrieb wird Punkt für Punkt positioniert und am Ziel eine Aktion ausgeführt, der Verfahrweg zwischen den Punkten ist dabei nicht relevant.
Typische Anwendungen
- Einfache Bohrautomaten
- Positionier- und Prüftische
- Punktbasierte Automatisierungen im 2D-Bereich